
Start the year with a current discussions between politics, science and practice and join the daily livestream of STUDIO Bund from 13.1. until 15.1. 2021 at 12:00 – 13:00, organized by the Federal Ministry of the Interior, Building and Community (BMI) together with the Federal Institute for Research on Building, Urban Affairs and Spatial Development (BBSR).
Find out more about the latest results of IP RWTH Aachen building research amongst others, take part in the various thematic focuses such as digitally planning, future vision and pandemic, rethinking collaboration etc.
Registration link: https://www.bbsr-registrierung.de/BAU2021/default.aspx

As part of the “Pilot project for a research and education center for construction processes and construction machinery in the Rhine Revier”, IP and ifas employees visited the Oberhausen intercompany training centre of the Bauindustrieverband NRW at the beginning of December. The aim of the project meeting was to get a look at the most modern construction machinery simulators that are operated there for training purposes. Also a teaching concept for digital construction processes was discussed, which is to be implemented and evaluated in 2021 at the reference construction site Campus West in test courses with students from ABZ Kerpen. The students were already involved in finding suitable teaching content through an online survey.

We are looking for highly motivated people for research and development in digital construction.
Do you have a master’s degree in civil engineering, economics or similar disciplines? Are you excited about robotics, building machineries, lean construction and BIM? Do you think you can you lead industrial projects in digital construction? Join our interdisciplinary research group at RWTH Aachen!
We provide an unique construction testing field in Aachen West for digital construction solution, expertises in the various fields of engineering, architecture and computer science and the opportunity for a Ph.D. in on-site logistics.
You will find further information in the job description: [Job Description](/files/WM_Civil Engineering_2020-11.pdf) The application deadline is the 15.01.2021.
Joint research project succesfully started. Since the beginning of August 2020, the Chair of Individualized Production (IP) and the Institute for Fluid Power Drives and Systems (ifas) have been working together on the planning and installation of construction machine demonstrators and test areas for machine operation on the reference construction site Campus West. This creates a basis for the real testing of developments for a digitalized construction site of the future. In cooperation with the Bauindustrieverband NRW, a further education center will also be set up on the reference construction site, where courses on digital construction processes will be rolled out for construction companies in the region. The project is funded by the Federal Ministry for Economic Affairs and Energy (BMWi) as part of the federal model project “Unternehmen Revier”.
The German version of the press release can be found here.
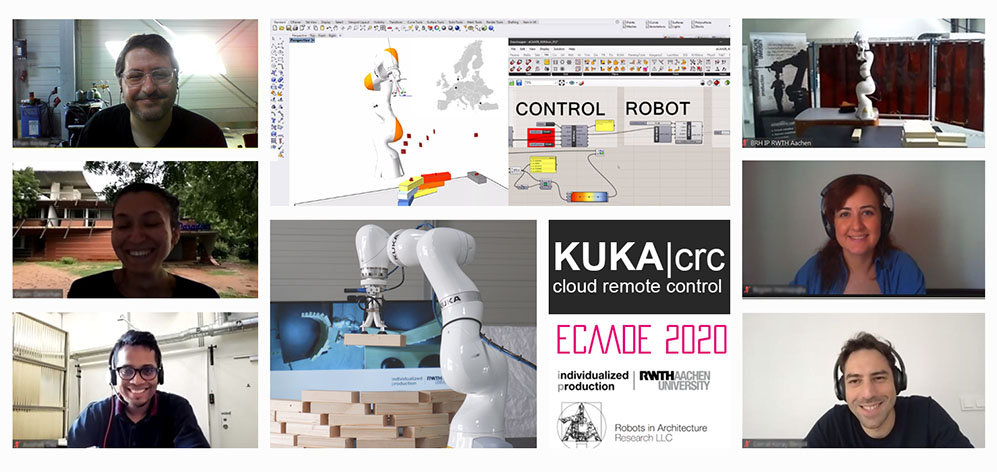
During the ECAADE 2020 digital conference, the Chair for Individualized Production held a KUKA|crc Cloud Remote Control workshop. This was the second successful test of a new software created by Robots in Architecture Research. This innovative process allows workshop participants to control robots from the comfort of their own international homes.
The Cloud Remote Control software empowers people from anywhere in the world to remotely engage in robotic fabrication. The automated cell is simulated and executed through the cloud with feedback immediately provided to the remote operator. Video streams, digital twins, and process data are streamed from the robotic cell allowing the operator to start, monitor and adapt their robotic process. Through CRC we engage worldwide audiences in robotic collaboration while maintaining safe social distances. We look forward to inviting more participants to test the Cloud Remote Control process in future workshops.
“Being able to stream construction data between digital and physical realms from different locations in real-time is a game-changer. Controlling a robot for the first time and from another country was an inspiring experience and motivated me a lot even in the pandemic conditions.”
feedback from ecaade workshop participant - Begüm Hamzaoğlu
Research Assistant
Istanbul Technical University
Faculty of Architecture · Department of Architecture